Hi,
I am trying to control a robot using HTTP requests. I would like to use [netsend] to send messages from Pd.
Trigger a recorded motion using HTTP requests
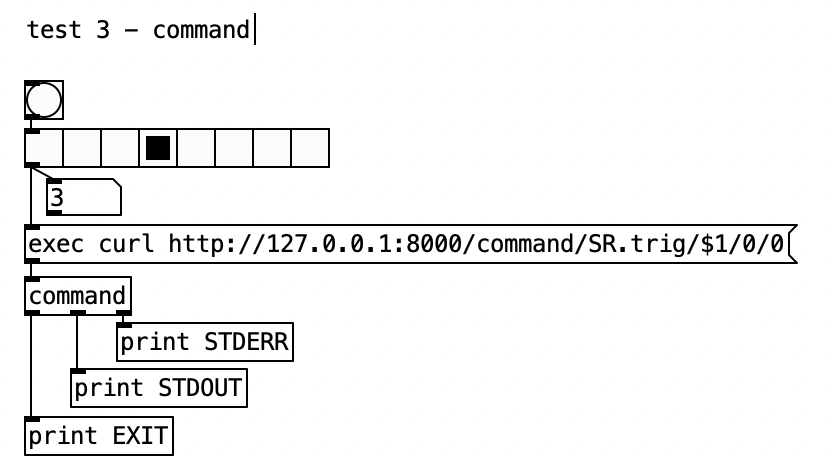
This can be done by making an HTTP request to the ikaros web server.
http://127.0.0.1:8000/command/SR.trig/X/0/0
X is the sequence. 0 Is the first sequence.
The local IP number 127.0.0.1 can be replaced by an assigned network IP.
If I write in the web browser address bar it works fine but I have not managed to get [netsend] working. I do notice that by sending [connect 127.0.0.1 8000( it seems connected but I think I am sending messages that are not formatted correctly. How should they look in pd?
Thanks!



")