-
bountybouncer
posted in technical issues • read moreI have a rasbbery pi 3 installed ubuntu mint, and I was not able to install pd via terminal so I have used ubuntu software center and I have downloaded a pd which I do not know the version and I had a project that I has comport in it , but it seems that this pd does not have comport node with it and could not crteate it and in my help menu there is nothing to find a external patches,
would you please help me in this regard?
Thanks indeed.
-
posted in technical issues • read more
@whale-av Thank you so much, what do you think of center frequencies range, I mean what set of numbers would best works with bp~,
I mean how do I divide frequency range for high, mid and bassthanks indeed
-
posted in technical issues • read more
@whale-av what is the difference between [bp~] and [biquad~} in this regard (2 pole 2 zero) and bandpass filter?
@gsagostinho how we could then use FFT here, is it applicable for 3 band EQ
I mentioned readsf and dac because I want to read file from hard disk and visualize it, and print because I wanted to see the out put before send it to visualizer so I get the grasp of what type of output I have so I could convert it to what I want -
posted in technical issues • read more
@gsagostinho yes I want to make this visualization from files from hard drive and from mic
-
posted in technical issues • read more
@gsagostinho I am not sure what numbers with [env~] I should use to hav 4 different base 4 different mid and 4 different high,
and all these env are connected to [readsf~ 12] which is connected from outlet to [dac~ 1 2 3 4] as well, but I am not sure of these -
posted in technical issues • read more
@gsagostinho I need to send the visualization out put as number, thus I need to see numbers in print then the same output for my visualization
-
posted in technical issues • read more
Thanks for your input @gsagostinho @pulsed
apologized for being late,
I have used the [bp~] method prior to posting this @pulsed, but I was not sure if it is the right method, I need to divide the base itself to four different parts and so the treble and high (12 different output in total), how do I use the number range for [env~] to divide these? and another issue is that it always trigger when you connect a number to [env~] I need it to trigger when a change is made,do I need to use metro for this?@gsagostinho thanks for your input, I have used that as well but where do I need to connect it to print where is the output? I have import a sound file and connect it instead of noise but I am not sure where to get this output?
Thanks.
-
posted in technical issues • read more
Hello gilberto @gsagostinho i need to have different signal levels ( eg. Base treble and high) to make audio visualization, i need data in form of number
-
posted in technical issues • read more
Hello Guys,
I wonder how we could devide audio/noise to different levels (BASS, TREBLE, HIGH)? -
posted in I/O hardware diy • read more
@alexandros Thanks for the input I notice dollar sign make variables, and trigger was something interesting, although when I put [t b f] it chagee only one variable, both have bang but only accept one variable I cannot have two of them (both variable have one value),
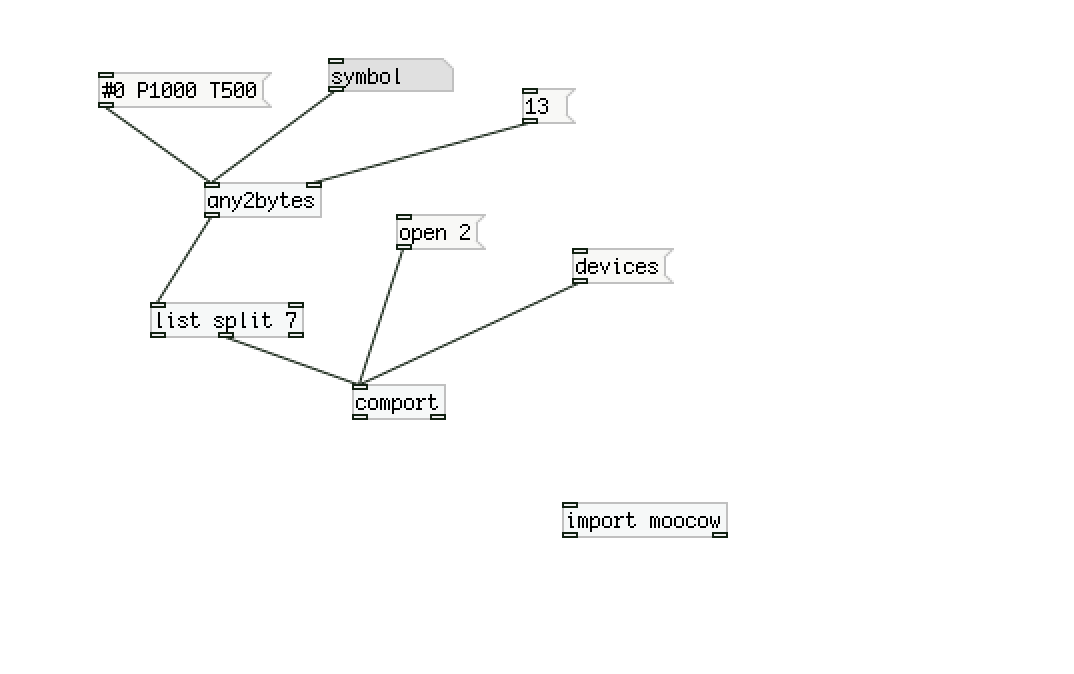
apart from that, there is some issue, I am getting long delay, I have number value that is changing very fast but the servo act with like 5 second delay or even sometimes 10 second, and after a while I am getting this error: [comport]: Write failed for -1 bytes, error is 35
what should I put into second inlet of [any2bytes] it mentioned it is end of string (EOS) I put -1, then I put 13, then 1 every time it stops working, with changing this it works for a while and then stop when I want to make it work again, and even when I want to start, many times it does not work only blinks, but after some try maybe it works with these,
I also getting TXORVERUN,
Do I need to add handshake [rtscst], [paritybit] and [stopbit] does these atoms make some changes in this case?
Now the Most important thing is randomly start, and it has got delay -
posted in I/O hardware diy • read more
@alexandros now how do I input a varying number into it,
I mean I have a varying number between 0 to 100 and I want to connect that into this, does [pack] atom works here, to combine different input, Servo number is constant, only position is varying I am not sure of time -
-
-
posted in I/O hardware diy • read more
@alexandros wow thanks, any2bytes created, and I made it in the way to told, the board blinks but not moving the servos,
Actually when I used pduino patch, and put [arduino] and [servo pin]
there, same thing happen the board blinks (TX led on the board blinks), but still servos do not move, I think board getting the message I still need to change something to be understandable by ssc32 -
posted in I/O hardware diy • read more
@alexandros thanks, great idea, but I did not have any2bytes patch, I download it from :
https://github.com/pd-projects/pdstring-libdir
unzip it and open it from preference and copy that in extra library folder, still it could not be created, do you have any idea of it,
I have tried make file as well in terminal I receive a long fatal error below:
*In file included from /usr/include/string.h:152:
/usr/include/sys/_types/_ssize_t.h:30:9: error: unknown type name
'__darwin_ssize_t'
typedef __darwin_ssize_t ssize_t; * -
posted in I/O hardware diy • read more
@cskonopka @alexandros
thanks for reply,
this is the datasheet:
http://www.lynxmotion.com/images/data/ssc-32.pdf
but mine is using usb and have ftdi chip on it to be used over USB port
in photo below:

@alexandros I have used your patch but it does work, or maybe I am not using it correctly
-
posted in I/O hardware diy • read more
Hello,
Recently i bought dfrobot ssc32 the one thhat is same as lynx motion ssc32 board, which control servo motors,The thing is That i did not find any ssc32 patch for pd, so i decided to use comport, but still having problem with it, the ssc32 board accept message like this #1 p2500 t500 from terminal, where # is for servo number, p is for position and t is for time, i have used print patch, it made the board blink but it does not move servos,
And i have tested with terminal and the board move servos, but with pd still does not,I would be happy if anyone can help,
Thanks,