Ultrasonic distance sensors with Pd in Bela
The ultrasonic distance sensors are usually digital, not analog. If this is the case, you're trying to read a digital signal as analog, which doesn't make much sense. This sensor has two pins, a trigger and an echo. You have to send a high voltage to the trigger pin, then pull it low, and read the echo pin which will help you compute the distance based on the time it took for this trigger pulse to arrive back at the echo pin.
The code below (copied from Arduino'g Project Hub), uses Arduino's pulseIn() function, to compute the distance:
// Define Trig and Echo pin:
#define trigPin 2
#define echoPin 3
// Define variables:
long duration;
int distance;
void setup() {
// Define inputs and outputs:
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
//Begin Serial communication at a baudrate of 9600:
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the echoPin, pulseIn() returns the duration (length of the pulse) in microseconds:
duration = pulseIn(echoPin, HIGH);
// Calculate the distance:
distance= duration*0.034/2;
// Print the distance on the Serial Monitor
Serial.print("Distance = ");
Serial.print(distance);
Serial.println(" cm");
delay(1000);
}
I searched online and found the source of this pulseIn() function in Arduino's forum, which is this:
/*
wiring_pulse.c - pulseIn() function
Part of Arduino - http://www.arduino.cc/
Copyright (c) 2005-2006 David A. Mellis
This library is free software; you can redistribute it and/or
modify it under the terms of the GNU Lesser General Public
License as published by the Free Software Foundation; either
version 2.1 of the License, or (at your option) any later version.
This library is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General
Public License along with this library; if not, write to the
Free Software Foundation, Inc., 59 Temple Place, Suite 330,
Boston, MA 02111-1307 USA
$Id: wiring.c 248 2007-02-03 15:36:30Z mellis $
*/
#include "wiring_private.h"
#include "pins_arduino.h"
/* Measures the length (in microseconds) of a pulse on the pin; state is HIGH
* or LOW, the type of pulse to measure. Works on pulses from 2-3 microseconds
* to 3 minutes in length, but must be called at least a few dozen microseconds
* before the start of the pulse. */
unsigned long pulseIn(uint8_t pin, uint8_t state, unsigned long timeout)
{
// cache the port and bit of the pin in order to speed up the
// pulse width measuring loop and achieve finer resolution. calling
// digitalRead() instead yields much coarser resolution.
uint8_t bit = digitalPinToBitMask(pin);
uint8_t port = digitalPinToPort(pin);
uint8_t stateMask = (state ? bit : 0);
unsigned long width = 0; // keep initialization out of time critical area
// convert the timeout from microseconds to a number of times through
// the initial loop; it takes 16 clock cycles per iteration.
unsigned long numloops = 0;
unsigned long maxloops = microsecondsToClockCycles(timeout) / 16;
// wait for any previous pulse to end
while ((*portInputRegister(port) & bit) == stateMask)
if (numloops++ == maxloops)
return 0;
// wait for the pulse to start
while ((*portInputRegister(port) & bit) != stateMask)
if (numloops++ == maxloops)
return 0;
// wait for the pulse to stop
while ((*portInputRegister(port) & bit) == stateMask) {
if (numloops++ == maxloops)
return 0;
width++;
}
// convert the reading to microseconds. The loop has been determined
// to be 20 clock cycles long and have about 16 clocks between the edge
// and the start of the loop. There will be some error introduced by
// the interrupt handlers.
return clockCyclesToMicroseconds(width * 21 + 16);
}
This is already getting complicated, as pulseIn() uses other functions which should be found and translated to Pd. I guess the best thing you can do is try to translate the first code chuck in this reply to Pd, and when you read a high voltage in the echo pin, do some math to calculate the distance.
In essence, set a digital input and a digital output pin on the Bela, trigger the output pin with a high and low signal, and keep reading the input pin (you should probably use a pull-down resistor there), until you get a high. Calculate the time it took with the [timer] object and do some simple math to get the distance. Do that with distances you know first, and then use the rule of three based on the known distance and the time you get. At least, that's how I would try to get this to work.
Another solution is to use an infrared proximity sensor, which is analog, and it's probably much easier to use. But this gets the proximity of obstacles right in front of it only, while the ultrasonic range finder has a wider field where it can detect obstacles.
 posted in technical issues
posted in technical issues
Keyboard HID vs serial comport for Sensor values on pico
I'm trying to get values from analog sensors connected to a raspberry pi pico. That pico is plugged into a rp5 where I want to read those sensor values in Pure Data. Question-- to interface the pico's sensor values with the Pure Data I can either
Use the pico as a keyboard HID device (using MicroPython on the pico, and "HID" object in Pure Data), or
Use the "comport" object in pure data to unpack and read the sensor values over serial.
Does anyone have any thoughts about either way? Limitations or resolution(if that even applies). Someone please correct any of this- I'm thinking the HID might be a bit friendlier, both pi's and an audio interface are going in a Disney princess guitar I got from goodwill eventually, but I'm trying to get it functional first. I see values in pure data using a Logitech USB game controller and the "HID" object, and about 10 years ago I got sensor values over serial with the "comport" object in Pure Data with an Arduino Nano v3.1. I was reading a little about the u2if git repository that might be another option...and Just found out about the teensy boards... was thinking the teenzy 4.0 might be a better option. But- I haven't gotten this working, so that's first. I appreciate this space!
 posted in I/O hardware diy
posted in I/O hardware diy
Arduino -> Pduino problem measuring lapsed time with [realtime]
Great input all of it, thanks!
@whale-av said:
@AndreasA You could probably round your data...... as you are always close to an integer (no 2 3 4 5 6 or 7).....
[expr int (0.5 + $f1) ]
.... maybe a [/ 10] first and a [* 10] after for the data we see....... but of course that is for a particular speed..... so maybe not?
You could also set a window large enough to accept changes as the speed varies, but filter numbers that are out of range (those around 20 in this case... or is it those around 10?) and reject them.
Yeah well didn’t give you enough information there. These numbers I get is at maximum speed of my wheel, or rather the lowest number that pd will output when over a certain speed. So I want it to be able to handle that and all slower speeds as well. The [smooth] is awesome, thanks for the tip!
@jameslo said:
@AndreasA I'm assuming that the numbers you are seeing in the Arduino IDE are timings you captured on the Arduino, not using [realtime], is that correct? If so I think @alexandros is suggesting that you send those timings to Pd, instead of trying to measure the times between Arduino messages on the Pd side.
Actually discovered some problems on the Arduino-side as well so I actually had both arduino and pd limit the output there for a while. But arduino is now definitely taken care of. With @alexandros method I’m closer to what I want but not quite there. Thinking about lowering the bar and deal with it as a limitation later on in the actual synth.
The thing with [realtime] was really interesting read. Good stuff to know!
Though, it would be awesome to have the resolution of serial_print but with firmata and pduino. Pduino is such a great interface for someone not use to coding and I’d like to add more sensors on the same arduino, which right now feels like a big undertaken without pduino and with my lack of knowledge.
Is there a way, do you think? Could I mess with the firmata code to add serial.print()? Obviously wrong forum, but just in case someone has tried.
 posted in technical issues
posted in technical issues
Arduino -> Pduino problem measuring lapsed time with [realtime]
I’m trying to measure the speed of a wheel to control a synth. I’m using an arduino and Pduino. There is bits of papers taped to the wheel and they pass through a photo interrupter module. It’s using the digital output. I’m using the realtime-object to measure the time between papers passing the interrupter.
My question is why my output from [realtime] looks like this:
print: 9.917
print: 20.032
print: 19.994
print: 10.03
print: 10.025
print: 20.043
print: 18.553
print: 11.467
print: 20.026
print: 20.007
print: 9.879
print: 20.018
print: 8.59
print: 21.44
print: 10.032
print: 20.017
print: 20.02
print: 10.034
print: 18.484
print: 21.428
print: 10.032
And so on…
The numbers are always close to a multiple of 10. I can’t find a single integer ending with 2, 3, 4, 5, 6, or 7. Since I can se the numbers directly from the arduino (in arduino IDE) I’m pretty sure it’s not a problem at the arduino or sensor end of things. The numbers there looks totally reasonable to me. So, what is going on with my patch or with Pduino that makes it look like this? I could add that when using the timer-object there is nothing but exact multiples of 10:s outputted.
Also the stream of numbers I get is way to inconsistent for my uses and jumps around a lot. As you can see in the patch attached I’m using two [moving-ave] to smooth it out to something near acceptable. Is there limitations to using Pduino or is this again something in my patch.
Fairly new to PD and arduino so I’m sure there is a lot a can do better. Any help is appreciated. Thanks!
Patch:
PduinoTest.pd
posted in technical issues
converting arduino sketches to run in Pd for Bela
hello! this question intersects with Pd even if it is not about Pd specifically...
I currently have several (installation) pieces in which the sound is run from Pd and then I have motors or sensors being run off other things.
This means that in one case I am using a raspberry pi for the Pd part and an Arduino mega for the motor part
In another case I have Pd running on a Bela/BBB and then an Arduino doing the motor stuff.
The reason for this inefficiency is that my knowledge is fairly limited on these platforms. However, it is annoying to have to use the extra gear when I don't have to. Especially because I know that both the raspberry and the Bela have pins that could be used in place of the arduino for this purpose. Since the Bela is a simpler case and the pins can be addressed directly from Pure Data, I will ask about that and leave the Raspberry behind for now (as I think I would end up running Pd AND Arduino on that board anyway, whereas with Bela, one can easily address the pins from inside Pd without any other programs or libraries).
My question is this: does anyone know how the standard mappings of pins Analog/Digital/and PWM pins on the Arduino lines up on the Bela? Does the Bela have have PWM pins like, for example pins 8,9, 10,11 on Arduino Mega or Dueminanove? And if so, what is the best way to address them from Pure Data? Basically, I'd like to convert my already very simple Arduino sketches over to Pd, so that both motors and Audio can run from the same patch.
I know this isn't specifically a Pd issue but I have asked a related question on the Bela forum but didn't get an answer so I hoped someone might know or be able to suggest a resource over here...
I have traversed the Bela documentation already of course....and will continue with that meanwhile.
Jorge
 posted in I/O hardware diy
posted in I/O hardware diy
PIR+ARDUINO+PDUINO
Hi @David and @Alexandros, thank you so much for your help, it is really appreciated.
Alexandros : the arduino abstraction includes comport, here is the arduino object pd:
arduino.pd.zip
I have followed your advice and included the arduino object and print, but this still not working.
Also, when I click on print nothing happens.
Here is my patch:
PIR_Arduino_Puredata V2.pd
What am I missing?
Many thanks again for any help you might provide
 posted in I/O hardware diy
posted in I/O hardware diy
PIR+ARDUINO+PDUINO
Jumping in due to David's prompt. I don't use PDuino, but I checked both yours and David's version of your patch, and there's no [arduino] or [comport] object. So, how do you expect to communicate with the Arduino using Firmata, since you don't have these two? [comport] is used for serial communication with USB devices, and [arduino] takes care to translate the user-friendly messages, such as "pinMode 2 input" to bytes in the Firmata protocol. I think the [arduino] abstraction includes the [comport] object, so it takes care of that for you.
From what I understand, you have to send this "pinMode" message to the [arduino] abstraction, and you'll receive some output from it. Connect a [print] to it to see what you get.
posted in I/O hardware diy
Comport in browser?
Hi! I'm stuck in a room with a Chromebook and an Arduino. I've got purrdata.glitch.me/ from @cuinjune working in one Chrome tab and Arduino IDE in another tab monitoring the serial input. What would be needed to get comport to read the serial port from the usb/arduino?
I guess the ultimate goal is: what is the lowest latency setup from an Arduino sensor into PD on a chromebook or browser only?
I don't necessarily need the Arduino environment running for my uses, it's just that it looks like it's running an agent that allows the site to access the usb. Thanks for any thoughts!
 posted in technical issues
posted in technical issues
How to loop/reset an audio file to the beginning
I'm not at the computer now, but I would proceed by steps.
Sensor = 1 play/resume, sensor 0 = stop. Get this very simple specification working first.
Then start the timer on sensor = 0 and be sure that the timer is counting correctly.
Btw I think you can simplify this using the pd [timer] object. Why? Because you need to know the elapsed time only when the sensor was 0 but becomes 1. So there is no need to poll the time continuously. Sensor 0, bang to timer's left inlet, sensor 1 to timer's right inlet.
Then:
- If the sensor goes to 0, the playback rate should change to 0 (pause).
- If the sensor goes to 1, the playback rate should change to 1 (play again).
- Note that these two behaviors do not depend on the timer at all!
- Then, also at the moment when the sensor becomes 1, if the timer shows a long enough period, then you would also send "all" to the left inlet.
hjh
 posted in technical issues
posted in technical issues
How to loop/reset an audio file to the beginning
I will check it late on my mac computer. for the moment I'm not on my computer, so I don't want to waste much time on it now as I think it will work on my computer.
For the moment I'm using your help file patch which is great. Your abstraction is so much more easy to use then from my patch I shared in the beginning.
what I'm trying to do is the following -
I will have 8 different sound files. Each sound file should be in a individual sf-play2~ object.
I will have data from 8 diffrent sensors I'm reading via arduino. Each sensor will report 0 or 1 (if sensor is pressed or not) alongside with analog data of numbers between 0 - 1023.
What I would like to do is that when I'm reading 1 the audio file will play, when reading 0 the audio file will pause . if 1 is held and the audio file arrived to it ends it will continue from the beginning. (loop 1) . I will also have a clocker to report how much time has elpased since sensor is 0. If more then x seconds the audio file will go back to beginnnig so next time sensor is held (1) it will start from the beginnnig.
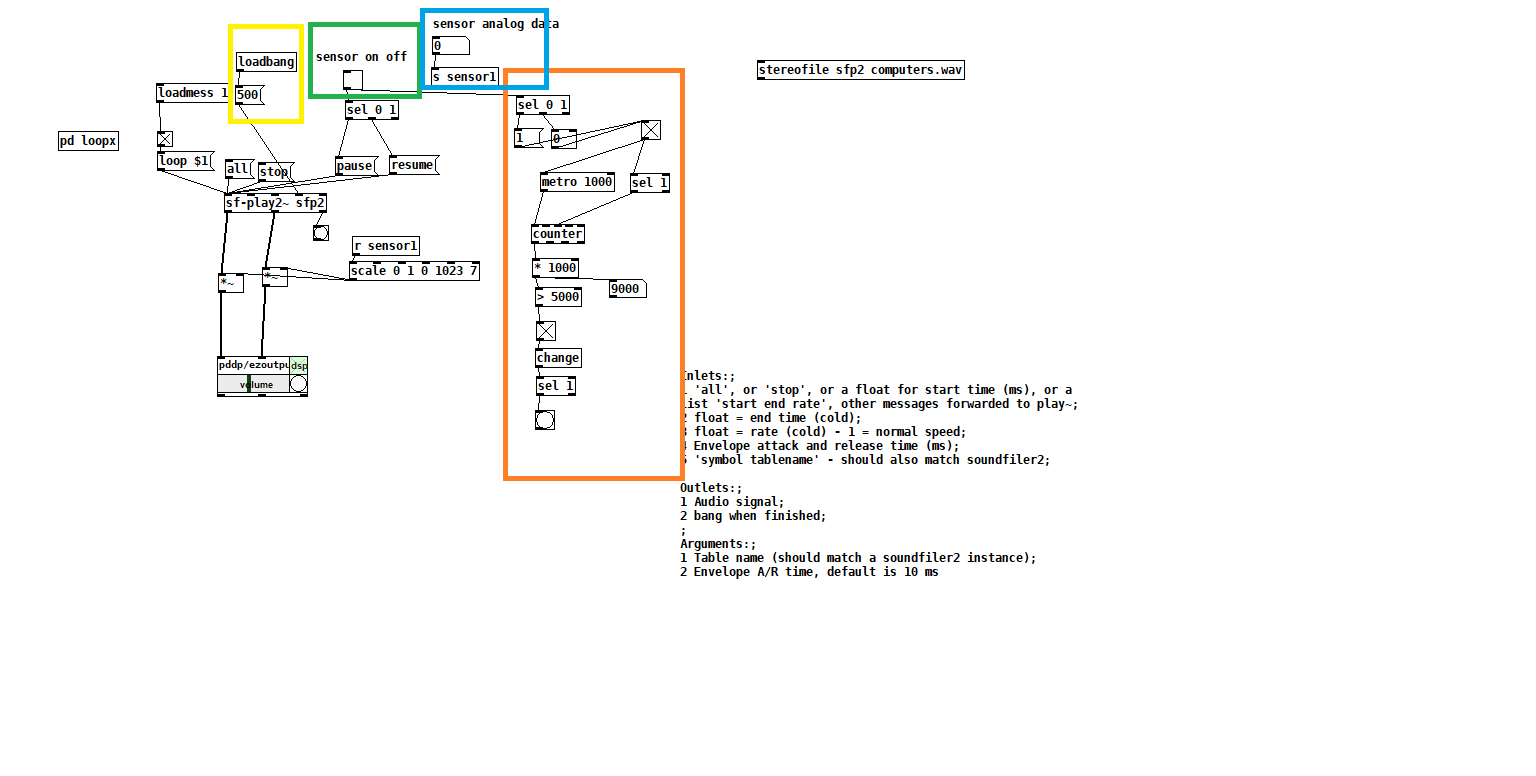
here is my try with your abstraction.
the green part is to imitate the on off from the sensor. the blue is the analog data from sensor.
the orange part is my try to make a clocker that will start count when sensor is off. The yellow part is for small envelop to avoide clicks when audio is pause and resume.
How can I make the audio file go to the beginning when the orange part is reporting a bang (that time was elapsed) ?
Also - I'm not sure if the yellow section is working. Meaning if it is indeed making an envelope on every pause and resume ? Is that possible?
Thanks!
edit: the scale of the sensor should be inverted. 0 1023 0 1
edit 2: how can I make the sf-play2~ go back to the beginning of the audio file without starting it immediately?
edit3: how can I load the file to the sf-play2~ object without starting it? if I don't press "all" message it won't load the file. I would lik the file to be loaded to the beginnnig, but to start and play only when receiving data from sensor on off. for the moment if I'm not pressing all message the file won't play.
 posted in technical issues
posted in technical issues