
Anyone have any tuts/examples of this?
-
Examples of Sending Relative Controllers?
2.5 billion genomes in 2.5 nanometres...now thats what I call data compression! Language of Life...love it
-
@image_engine Can you be more specific? Not sure sure to understand your question.
-
I have a need whereby I hold a foot pedal down and want it to send a relative controller to change a Vol slider...but it seems quite complex...not just a single eg 64 127 1 type controller message...would help if I could see example of others using it.
Eg If I send a cc 96 (inc) with 127 it increments but in large steps...one controller Ive never to had to manage...always a first!
Hth2.5 billion genomes in 2.5 nanometres...now thats what I call data compression! Language of Life...love it
-
@image_engine Probably not exactly what you are looking for......?
If the pedal sends just one cc message each press.
step.pdBut then you need to generate repeats for a "held down" pedal..........
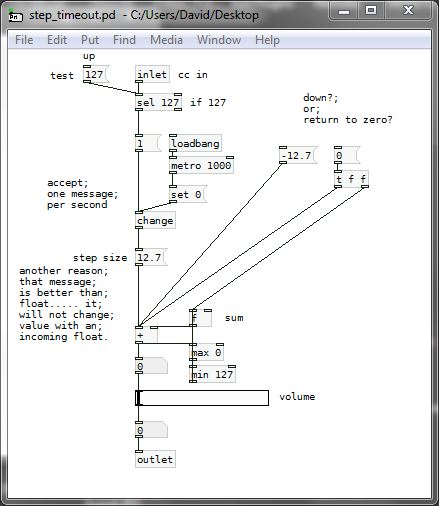
step_hold.pdIf it sends continuous data (127) it will need a timeout (step time) as well as a step size.
step_timeout.pdAll together now......... step all.zip
In all cases you could use another fader (range 0-127) instead of the [max 0] [min 127] combination....... as that would limit the range as well......
Of course you need to scale the volume output...... [/ 127] or.... more efficient...... [* 0.007874]
David.
-
Thanks @whale-av. I should have given more background...
Im trying to emulate the rotary knob endless type encoder that sends incremental relative controllers. It would seem that it sends 2 messages using NRPN which Im completely unfamiliar with and not really understanding what I have read...so here is the background;Building on the behaviour abstraction you helped me with previously, we have 4 possible behaviours (and flag outputs); a single quick click, a double click, which are fairly immediate actions Ill refer to as primary and secondary. Then there are 2 behaviours that have a pedal hold action;
AA. PedDown held for more than 500ms and its cousin;
AB. PedDown/PedUp/PedDown and holdIll refer to AA - (A)ction(A) etc and AB - (A)ction(B) below
These will standard actions of lower/raise volume as the pedal is held...So Ill use the metronome in Live as my first example; I want to be able to turn the it on and off during various looping during performance (which is really a click track that uses hi hats samples instead of obnoxious ping pong sound). This happens by the primary action of a quick click as a toggle.
Depending on context, the click volume quite often needs to be varied as the song progresses in layers, so I want AA (Action A) to send inc controller up and AB dec etc. The same AA and AB are used when Im controlling volume on a track so it needs to be relative and not absolute.No resets are required etc as only a relative controller will do, because I dont know what current level may be applied...absolute scaling is not really what Im after...I did try that originally but is not ideal.
This is a sketch I came up with...but the actual message for inc/dec type multi part controller is the mystery I need solved. This is using the track number + 16 as the cc number but I was thinking to parametise the input once its working. I realise this sketch misses the first fire from the pedal but I can live with that due to the extra simplicity...unless there is another easier way to do it?
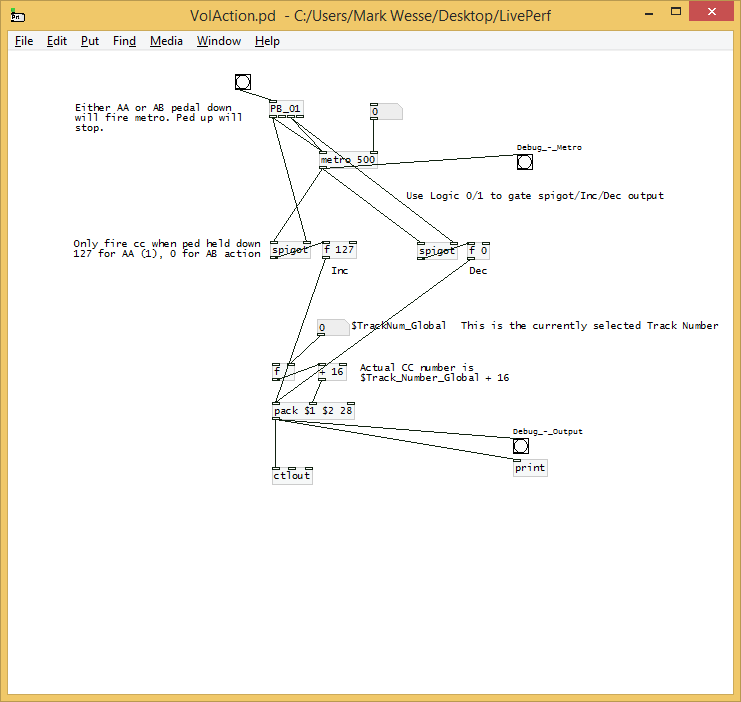
HTH
CheersEDIT: Ok...answered by myself but hopefully help others..in Live, you set controller to Signed Bit 2. Then any cc can be treated as relative. The key to the step size is expected acceleration; 1-63 is increment speed, 65-127 is decrement speed ie value of 1 is slow ramp, 63 is large steps.
2.5 billion genomes in 2.5 nanometres...now thats what I call data compression! Language of Life...love it

