Pd-Extended for Debian
** EDIT ** I created an UPDATED version on this wiki page with steps to follow. Here:
http://puredata.info/docs/developer/DebianWheezyAmd64
Hi Nicola,
@bamboomusic said:
Hi, I've just installed Debian Wheezy amd64, but I can't be able to find a compiled Pd-Extended version for Debian 64-bit.
I checked in:
http://puredata.info/community/projects/software/pd-extended
http://autobuild.puredata.info/auto-build/and in the puredata repo, but I only found i386 versions.
Am I missing something?
I think simply there is no packaged version.
I actually managed to build the source partly following the instructions found here:
http://puredata.info/docs/developer/Debian and thanks to the script in the scripts directory in the source package - credit really goes to the authors of these ")
with some modifications and additions:
---- WARNING. Pretty much untested. Pd starts, no libraries complain, audio and a bunch of patches I have work with alsa and jack ----
-
Add the debian multimedia repository as explained directly on their page:
http://debian-multimedia.org/ -
Do the build-dep as explained but with a slight modification
apt-get build-dep puredata gem pd-pdp
(notice pd-pdp non not pdp)
-
Install the following packages not listed on that page:
apt-get install libmp3lame0 libmp3lame-dev ladspa-sdk dssi-dev libimlib2-dev libtheora-dev
-
Install libquicktime1 and libquicktime-dev from the official main packages *not* with apt. The links:
http://packages.debian.org/testing/libs/libquicktime1
http://packages.debian.org/wheezy/libquicktime-dev -
Get the source of Pd-extended, unpack anywere as explained in other places..
-
from the main source directory go to source dir for pidip:
cd externals/pidip/
-
configure and make pidip with the following switches:
./configure --with-pd=../../pd --with-pdp=../pdp
make -
chdir to scripts/auto-build/ from the source dir:
cd scripts/auto-build/
-
Start the ./pd-extended-auto-builder.sh script:
./pd-extended-auto-builder.sh
-
Wait...
-
Cross fingers...
-
Ignore some scary messages...
If everything went well there should be a message saying you have a deb in dir ./packages/linux_make/Pd-0.42.5-extended.deb (still from the source root): -
cd there:
cd ../../packages/linux_make/
-
Finally install:
dpkg -i Pd-0.42.5-extended.deb
By the way I got a nice .deb so maybe I could put it up somewhere, not sure about the dependencies though.
Hope this helps,
Lorenzo
 posted in this forum
posted in this forum
Animata / eyesweb / MAC
Hi kinolab, here interesting news for you:
As a gift for the beginning of 2011, there's a new "unstable" version
of OpenNI & Sensor modules with MacOSX support!
Other new features:
* Added support for multiple sensors.
* Improved README! (much more detailed instructions...)
* Some bug fixes...
Previous version features:
* A brand new .NET wrapper and .NET samples (OpenNI.net).
NITE binaries for all supported platforms (including MacOSX) will also
be released very soon.
The source code is located at:
https://github.com/OpenNI/OpenNI/tree/unstable
https://github.com/PrimeSense/Sensor/tree/unstable
GitHub:
git clone https://github.com/OpenNI/OpenNI.git -b unstable
git clone https://github.com/PrimeSense/Sensor.git -b unstable
Binaries:
Windows:
http://openni.org/sites/default/files/unstable/OpenNI-Bin-Win32-v1.0....
http://downloads.primesense.com/unstable/Sensor-Bin-Win32-v5.0.0.25.exe
Ubuntu 10.10 x86:
http://openni.org/sites/default/files/unstable/OpenNI-Bin-Linux32-v1....
http://downloads.primesense.com/unstable/Sensor-Bin-Linux32-v5.0.0.25...
Ubuntu 10.10 x64:
http://openni.org/sites/default/files/unstable/OpenNI-Bin-Linux64-v1....
http://downloads.primesense.com/unstable/Sensor-Bin-Linux64-v5.0.0.25...
MacOSX 10.6:
http://openni.org/sites/default/files/unstable/OpenNI-Bin-MacOSX-v1.0...
http://downloads.primesense.com/unstable/Sensor-Bin-MacOSX-v5.0.0.25....
We're really amazed from the awesome response of the community!
And thanks for everyone that's helped.
Ziv.
 posted in technical issues
posted in technical issues
Help with edit more sample
If you're talking about the sound editor I posted recently, look inside [pd codey-code] for [pd file] and [pd copy].
That should get you on your way.
Basically you need to read from one array and write the values to another array.
So if have your 8 channel sample player + editor, and want to edit and save sample1 then edit sample4, it would go like this.
1.Check how many values sample1 array has.
2.Resize editor array to match sample1 array.
3.Read the values from sample1 array, and write them into editor array.
4.Edit sample.
5.Check how long edit array is, after editing.
6.Resize sample1 array to match editor array.
7.Read values into sample1 from editor.
8.Check how many values sample4 array has.
9.Resize editor array to match sample4 array.
10.Read the values from sample4 array, and write them into editor array.
11.Edit sample.
12 .............etc.
Hope that makes it clear.
Good Luck!
 posted in technical issues
posted in technical issues
Arduino, ultrasonics and Pd: HELP needed for degree project!
Dear Pd'ers… I'm fairly new to Pd and have been using it during my 'Audio Production' degree at SAE college in London. I'm here to ask for help on my final degree project, which aims to control objects within Pd by way of proximity sensors connected to Arduino.
I have had moderate success, first using a Sharp GPD12 IR sensor connected to an analog port on an Arduino Diecimila, then a Devantech SRF02 connected via I2C to Arduino. I have managed to get Pure Data reading the sensor values using the Pure Data example included in SimpleMessageSystem (http://www.arduino.cc/playground/uploads/Code/SimpleMessageSystem.zip)... and only altering the number of the comport the Arduino appears on.
On the Arduino end, I have added the SimpleMessageSystem library, and am using the following sketch to run one or both of the sensors depending on whether or not I omit the SRF02 or GPD12 parts of the code.
// top //
#include <Wire.h>
#include <Servo.h>
#include <SimpleMessageSystem.h>
int sensorPin = 0;
int sensorValue = 0;
Servo servo1;
#define sensorAddress 0x70
#define readInches 0x50
#define readCentimeters 0x51
#define readMicroseconds 0x52
#define resultRegister 0x02
void setup()
{
Wire.begin();
Serial.begin(9600);
}
void sendCommand (int address, int command) {
Wire.beginTransmission(address);
Wire.send(0x00);
Wire.send(command);
Wire.endTransmission();
}
void setRegister(int address, int thisRegister) {
Wire.beginTransmission(address);
Wire.send(thisRegister);
Wire.endTransmission();
}
int readData(int address, int numBytes) {
int result = 0;
Wire.requestFrom(address, numBytes);
while (Wire.available() < 2 );{
}
result = Wire.receive() * 256;
result = result + Wire.receive();
return result;
}
void loop()
{
// SRF02 READING //
sendCommand(sensorAddress, readInches);
delay(70);
setRegister(sensorAddress, resultRegister);
int sensorReading = readData(sensorAddress, 2);
Serial.println(sensorReading);
delay (200);
// GPD12 READING //
sensorValue = analogRead(sensorPin);
int range = (6787 / sensorValue);
Serial.println(range);
delay(200);
}
// bottom //
Pure data is picking up the sensor's output as a decimal number, through the serial port, correctly, and showing this as a number in the SPECIAL CHARACTER section of the Pd patch, which I can then use to control various Pd parameters, like a slider for example.
If printing both sensor readings to the serial, the Pd patch will pick up the two sensor values alternately, but there seems no way of differentiating the two sensors within Pd, as they both come through the serial. I have tried prepending the serial print at the Arduino stage with a tag such as "IR" or "UL" for each sensor, but this simply ends up in nothing coming through in Pd.
Using one sensor gives the ability to control parameters with a fairly narrow detection range, but for the final version I would like to incorporate 4 or 5 sensors in order that I can cover nearly a full 360 degree range.
After a bit of research I have gone and bought 4 x Maxsonar EZ0's. They've got a wider range than the Devantech sensors, and can operate via I2C, serial or PWM. A number of people online seem to mention the improved stability when operating via PWM, so I thought this could be kinda useful.
I am going to London Hackspace tomorrow to get help with wiring up the sensors to my Arduino Diecimila, but for now, my main problem seems to be how to achieve greater communication between Pure Data and the sensors. It's all very good and well being able to take the decimal readout from an analog input to give one set of values in Pd, but I would like to know how to either to read (and trigger) each sensor discretely via PWM, or to somehow differentiate between each sensor's analog output, so that I can have the different sensors controlling different objects within Pd.
As well as SimpleMessageSystem, I looked at using the Pduino object. But to be honest, it is either not working properly (I have noticed reported issues with bugginess), or I am being stupid, as it has totally boggled my brain. In theory though, it seems like it should be able to do what I want, ie. send and receive commands between Arduino and Pd.
****************************************
So…. my questions for anyone out there with a knowledge of using Arduino + multiple sensors (preferably Maxsonar EZ's) with Pd are:
What is most appropriate for my project?
- Simple Message System or Pduino?
- analog or PWM?
And how do I get proper communication between the two platforms so I can discern discrete values from each sensor?
I'd really like to get a discussion going with this as (a) it would really help me in my degree (which ends in about 4 weeks!!!) and (b) I really want to share what I am doing, especially as the discussions on Arduino/Pd communication on the various forums seem a little patchy (at least for noobs like me). I also hope to continue my research in the future, sharing any findings I make with the community…
****************************************
PS. In the sharing spirit, please check out the Radio Tuner patch I've just posted over on the patch section of this forum - it's my first successful attempt at Pd... I hope you enjoy
 posted in I/O hardware diy
posted in I/O hardware diy
Rumble Box
Hi toxonic
It doesnt work for me
equ: filter unstable -> resetting
equ: filter unstable -> resetting
equ: filter unstable -> resetting
equ: filter unstable -> resetting
equ: filter unstable -> resetting
equ: filter unstable -> resetting
equ: filter unstable -> resetting
equ: filter unstable -> resetting
expr divide by zero detected
error: : no such array
... you might be able to track this down from the Find menu.
error: : no such array
error: : no such array
error: : no such array
error: : no such array
error: : no such array
error: : no such array
error: : no such array
error: : no such array
error: : no such array
error: : no such array
error: : no such array
error: : no such array
error: : no such array
 posted in patch~
posted in patch~
Yay...
I took this from my blog which is an eyesore and hard to concentrate on.
Let's learn how to combine arduino and puredata into one almighty power, the mighty AARRGHDATA(i think the proper name is the classier pduino, i guess you say it peedweeno, or padooiino)
Firstly. If you haven't already, check that your arduino is working. if you know this. keep scrolling until you see a kitten.
Plug it in and fire up the arduino software. You can get that from here
now lets do a quick test(is shouldve flashed when you plugged it in anyway) but get an LED, and put it so that the longer leg(theres a fancy name for this) is in the slot for digital pin 13 and the shorter leg(also has a fancy name) is in GND(you could say things "gund" or "gnnnd" but im fairly sure it just means GROUND.
now go file>sketchbook>examples>digital>blink and it will open that sketch. click the "upload" button and watch as it updates you on upload status and tells you when its complete.
is it blinking? nice. i could go on more about this, but i want to talk about PD, thats where it gets fun.
KITTENS
you can start looking again if you like pd.
once again, go to file>sketchbook>examples>library-firmata>standard firmata
dont see it? its a standard library now, so you should probably check you have the latest version(anything above 12 will be fine)
around this time you want to open pd and try create an object called "arduino". nothing? then you need to be going here to visit the wonderful mr hans, and download pduino.(i'm not sure if the arduino library is standard in pd extended now)
did you upload that standard firmata sketch to your board? i didnt tell you to. but thats ok, i like the way you think. do that if you haven't.
once thats uploaded properly, you can quit the arduino software, we do not need its services anymore.
now go inside that pduino folder you downloaded and open the patch arduino-test.pd
you should see something like thisss.
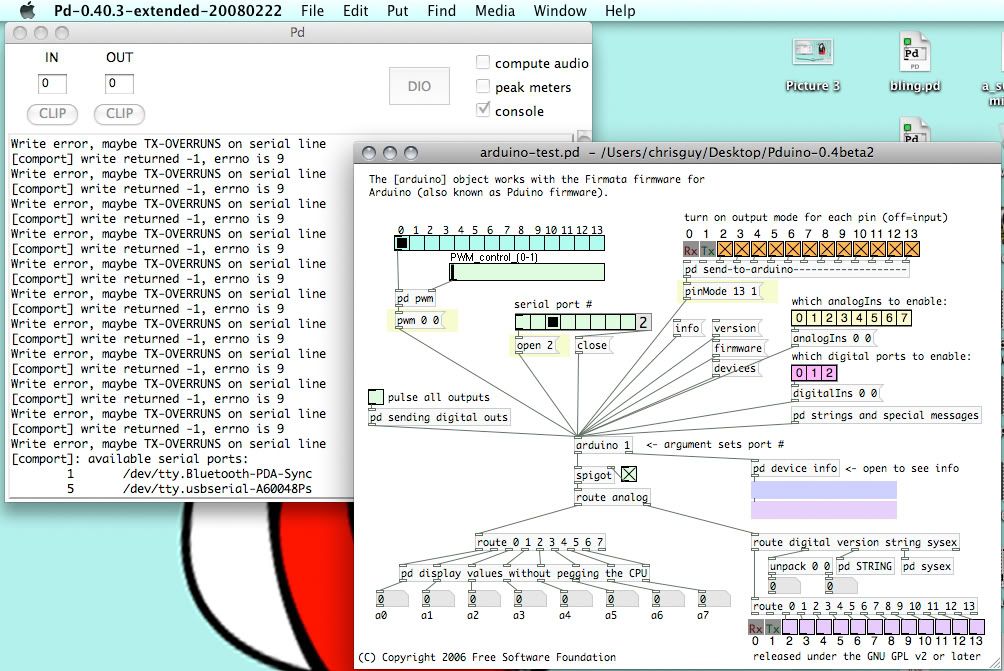
i dont know why all those errors happen. but click the "devices" message box in there to check what port your arduino is on.
hans is pretty awesome for making this patch, its really easy to understand i think.
change your port to whatever pd tells you your arduino is on.
HUZZAH! CONNECTIVITY!
now, lets say we still have that LED plugged in. want to test it?
hit that "pulse all outputs" toggle, and it should blink on and off. look around that subpatch, its pretty simple too. (you will want to know all these messages to send when writing your own patch for stuff)
Input is easy too. turn on that little toggle under [arduino 1] to let through outlet info.
you'll also want to enable your analogIns in the yellow radio up there.
say you had a potentiometer you wanted to connect up, it's really easy. and a breadboard will make all your connections easier to make.
but you'd just connect it up like this.
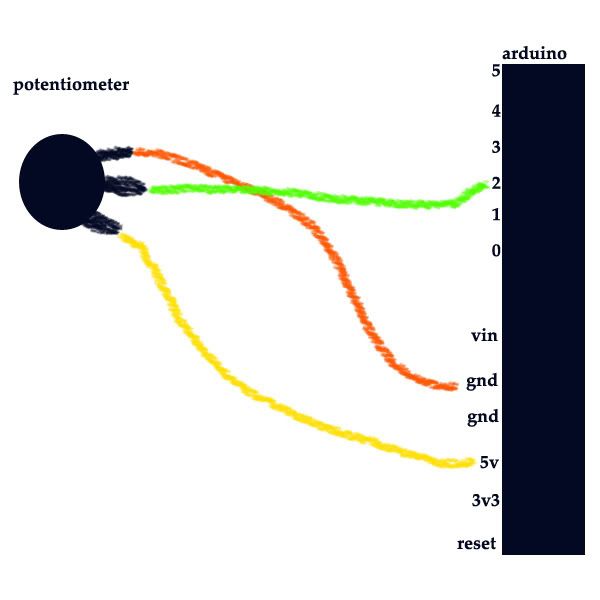
then you'd just enable the input you are using in that patch(input 2 in this case) and watch the input stream in through the a3 number box at the bottom.
this is how it works for me anyway.
that should just show you how the basics of it work, and you can move from there.
 posted in I/O hardware diy
posted in I/O hardware diy
Arduino and pure data
Hello. I'm trying to use Arduino with Puredata using the Firmata Library. I downloaded Firmata and installed the library as instructed in the readme, and then loaded 'AnalogFirmata' from the library examples. When I try to compile this example (or any of the others) I receive a string of error statements. Code and errors listed below. Any suggestions?
Code:
/* This firmware supports as many analog ports as possible, all analog inputs,
* four PWM outputs, and two with servo support.
*
* This example code is in the public domain.
*/
#include <Firmata.h>
#include <Servo.h>
/*==============================================================================
* GLOBAL VARIABLES
*============================================================================*/
/* servos */
Servo servo9, servo10; // one instance per pin
/* analog inputs */
int analogInputsToReport = 0; // bitwise array to store pin reporting
int analogPin = 0; // counter for reading analog pins
/* timer variables */
extern volatile unsigned long timer0_overflow_count; // timer0 from wiring.c
unsigned long nextExecuteTime; // for comparison with timer0_overflow_count
/*==============================================================================
* FUNCTIONS
*============================================================================*/
void analogWriteCallback(byte pin, int value)
{
switch(pin) {
case 9: servo9.write(value); break;
case 10: servo10.write(value); break;
case 3:
case 5:
case 6:
case 11: // PWM pins
analogWrite(pin, value);
break;
}
}
// -----------------------------------------------------------------------------
// sets bits in a bit array (int) to toggle the reporting of the analogIns
void reportAnalogCallback(byte pin, int value)
{
if(value == 0) {
analogInputsToReport = analogInputsToReport &~ (1 << pin);
}
else { // everything but 0 enables reporting of that pin
analogInputsToReport = analogInputsToReport | (1 << pin);
}
// TODO: save status to EEPROM here, if changed
}
/*==============================================================================
* SETUP()
*============================================================================*/
void setup()
{
Firmata.setFirmwareVersion(0, 2);
Firmata.attach(ANALOG_MESSAGE, analogWriteCallback);
Firmata.attach(REPORT_ANALOG, reportAnalogCallback);
servo9.attach(9);
servo10.attach(10);
Firmata.begin();
}
/*==============================================================================
* LOOP()
*============================================================================*/
void loop()
{
while(Firmata.available())
Firmata.processInput();
if(timer0_overflow_count > nextExecuteTime) {
nextExecuteTime = timer0_overflow_count + 19; // run this every 20ms
for(analogPin=0;analogPin<TOTAL_ANALOG_PINS;analogPin++) {
if( analogInputsToReport & (1 << analogPin) )
Firmata.sendAnalog(analogPin, analogRead(analogPin));
}
}
}
Error Statements:
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:61: error: typedef 'callbackFunction' is initialized (use __typeof__ instead)
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:61: error: 'byte' was not declared in this scope
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:61: error: expected primary-expression before 'int'
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:64: error: typedef 'sysexCallbackFunction' is initialized (use __typeof__ instead)
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:64: error: 'byte' was not declared in this scope
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:64: error: 'byte' was not declared in this scope
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:64: error: 'byte' was not declared in this scope
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:64: error: 'argv' was not declared in this scope
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:81: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:81: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:86: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:87: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:88: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:90: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:91: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:91: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:91: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:95: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:95: error: 'callbackFunction' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:96: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:97: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:98: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:98: error: 'sysexCallbackFunction' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:98: error: 'void FirmataClass::attach(int, int)' cannot be overloaded
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:95: error: with 'void FirmataClass::attach(int, int)'
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:99: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:104: error: 'byte' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:105: error: ISO C++ forbids declaration of 'byte' with no type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:105: error: expected ';' before '*' token
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:107: error: 'byte' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:108: error: 'byte' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:109: error: 'byte' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:110: error: 'byte' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:112: error: 'boolean' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:115: error: 'callbackFunction' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:116: error: 'callbackFunction' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:117: error: 'callbackFunction' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:118: error: 'callbackFunction' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:119: error: 'callbackFunction' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:122: error: 'sysexCallbackFunction' does not name a type
In function 'void setup()':
 posted in technical issues
posted in technical issues
Interfacing PD with the Arduino ... how?
i got a problem in uploading the file to the board. ( I have press play, same error found. When I press upload to I/O, below error found)
anyone can help?
thx
////////////////////////////
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:61: error: typedef 'callbackFunction' is initialized (use __typeof__ instead)
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:61: error: 'byte' was not declared in this scope
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:61: error: expected primary-expression before 'int'
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:64: error: typedef 'sysexCallbackFunction' is initialized (use __typeof__ instead)
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:64: error: 'byte' was not declared in this scope
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:64: error: 'byte' was not declared in this scope
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:64: error: 'byte' was not declared in this scope
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:64: error: 'argv' was not declared in this scope
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:81: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:81: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:86: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:87: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:88: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:90: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:91: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:91: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:91: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:95: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:95: error: 'callbackFunction' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:96: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:97: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:98: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:98: error: 'sysexCallbackFunction' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:98: error: 'void FirmataClass::attach(int, int)' cannot be overloaded
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:95: error: with 'void FirmataClass::attach(int, int)'
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:99: error: 'byte' has not been declared
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:104: error: 'byte' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:105: error: ISO C++ forbids declaration of 'byte' with no type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:105: error: expected ';' before '*' token
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:107: error: 'byte' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:108: error: 'byte' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:109: error: 'byte' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:110: error: 'byte' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:112: error: 'boolean' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:115: error: 'callbackFunction' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:116: error: 'callbackFunction' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:117: error: 'callbackFunction' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:118: error: 'callbackFunction' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:119: error: 'callbackFunction' does not name a type
/Applications/arduino-0012/hardware/libraries/Firmata/Firmata.h:122: error: 'sysexCallbackFunction' does not name a type
In function 'void setup()':
 posted in technical issues
posted in technical issues
Saving diferent data
sorry for asking stupid questions! I found out how to write and save arrays to a txt-file. But after 2 days of doing research in the web and the pd tutorials I couldn't find any solution for my issue.
I understood that arrays are for saving the curve of a sound. I still don't understand how to fill the array with flexibly data.
Let me explain how I would like to use the array.
array[int index][0] - integer with value of velocity
array[int index][1] - integer with value of frequency
array[int index][2] - string with filename
with:
array[0][] - song1.wav
array[1][] - song2.wav
later on I want to do a "nearest neighbor search" on the array. to play a suitable song.
Please help me! You'd help me a lot.
Michael
 posted in technical issues
posted in technical issues
Preset with QList
I made an event looper "eveloop" patch with [textfile], works like a tape loop, storing and playing back any Pd messages in a loop. The patch is complex and has a few bugs still, but it works enough for me to make interesting sounds.
Screenshot of patch that does the work (a bug in Pd ate the name labels on the canvases):
[url=http://puredata.info/Members/claudiusmaximus/copyme/gravity/screenshots/gravity-20040622-cm_g_eveloop.pd.png
]http://puredata.info/Members/claudiusmaximus/copyme/gravity/screenshot s/gravity-20040622-cm_g_eveloop.pd.png
Screenshot of patch in use:
[url=http://puredata.info/Members/claudiusmaximus/copyme/gravity/screenshots/gravity-20040622-cm_g_gravity.pd.png/
]http://puredata.info/Members/claudiusmaximus/copyme/gravity/screenshot s/gravity-20040622-cm_g_gravity.pd.png/
Patches cm_g_eveloop*.pd are part of Copy Me - Gravity, they require IEMLIB for [prepend] and [gate]. The cm_g_gravity.pd patch also requires my DCM100 Mixtab patches, but the rest don't.
[url=http://puredata.info/Members/claudiusmaximus/copyme/gravity/source/
]http://puredata.info/Members/claudiusmaximus/copyme/gravity/source/
Some sounds made with it - the ones after 2004-06-20 use eveloop, earlier ones just had a [metro]:
[url=http://puredata.info/Members/claudiusmaximus/copyme/gravity/sounds/
]http://puredata.info/Members/claudiusmaximus/copyme/gravity/sounds/
Todo for the future: make a bank of 16 loops in parallel with a unified GUI, to make it easier to make music - it is hard when one loop contains all the control data for an instrument, you can't change just one controller without clearing all the others. I have a good idea how to do this, and I have time too, but I am lazy ")
{kind=link}
{kind=link}
 posted in abstract~
posted in abstract~